For years they've been saying The Robots Are Coming, and some still say so.
Fact is … THE ROBOTS ARE HERE!
We call them robots if they do jobs humans used to do, or are still doing. Robot-like means doing a job mechanically, as though a machine were doing it.
Most people know that robots are already used in producing cars in Japan, and here in the US the major car makers are rapidly converting much of their production to include robots in their assembly lines. Industrial robots are taking over Much of the drilling, welding and painting, and soon will be doing much more complicated jobs they've been developed for in other manufacturing processes all around the world.
Not only cars and kitchen appliances, but transistor radios, digital watches, and nearly all processes which involve mass production of precision appliances are now being robotized, or will be soon.
Not Man-like Machines
The robot is not a man-like machine which can do most things humans can do. Those are demonstration "robots," or sophisticated toys, or learning tools. They will be discussed in this article, but the important robots of the future (which are here today) are programmable machines which can do jobs formerly done by humans, but now, or soon, are better done by machines.
In the last two years microcomputer and microprocessors, which are the heart of micros and robots have begun to outnumber human beings. That's right, there are beginning to be more of them than there are of us! I'm not talking about intelligent electronic beings, of course, but about obedient electronic servants. Most of them are small special-purpose computers, such as are used in automobiles for controlling ignition, microwave ovens and other appliances for controlling their operation, and of course, our own special interest, microcomputers, (micros from here on) which are desktop or smaller general-purpose computers, for home, business and entertainment.
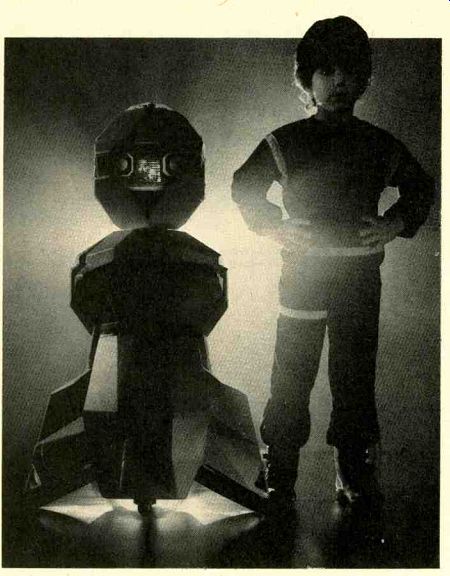
---------- Far from fanciful humanoids like Topo by Androbot (left,
facing his Master), real robots are hard at work day and night in factories
producing automobiles and appliances. More thousands are being installed
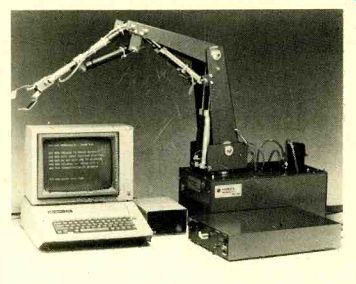
every day. Above is an educational robot arm from Feedback, Inc. Armdraulic
MK II 1052 has a memory of eight program sequences, each with up to
64 preprogrammed arm positions. The MK I1 1052 can be controlled by
remote pendant or an optional microcomputer.
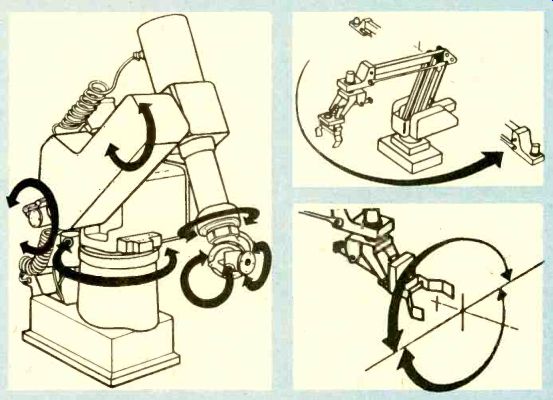
-------- Heavy-duty industrial robot at left above for production
assembly by Cincinnati Millacron shows six degrees of motion on fixed
pedestal.
Above top drawing illustrates wrist motions of gripping claw at end of robot "arm" while lower drawing shows how arm rotates in horizontal plane. Microprocessor in base controls arm in five axes of motion to demonstrate and teach industrial robotics in school. Apple Ile micro is used here.
By the late Eighties it's estimated that over half of all workers will in some way be involved with computers and robots either using them or working on them or designing them or fixing them. Computers will control most of the machines doing mass production, and even most service-related work. Yet by the beginning of 1984, less than ten percent of the children in the US had taken any computer-learning classes.
In the years ahead people without some familiarity with computers, at least using the keyboard to put data in, and get information out, will be in worse shape than an illiterate of the 1950s up to today. You will have to be at least slightly computer-literate in the years ahead, as jobs shift more and more to controlling the machines that do the real work.
It's estimated that there are now over a billion microcomputers world-wide, of which at least 10 million are home/business micros. As time goes on there will continue to be more and more small computers serving us in ever more ways and controlling (under our supervision) the work of production and of our daily lives.
Staying Ahead of Micros
People who are at home with computers and robots, especially how to design and/or (not how they work and how to fix them) will be in better shape to get ahead and stay ahead in the coming world. Everyone knows that things will never be the same again.
The Robot Brain
All robots have electronic brains. That is, they are run by microprocessors, which are the controlling part of microcomputers. Generally, a robot will have a microcomputer for its brain, receiving input signals from its "eyes," its "ears," and other sensing parts, such as its sonar (distance-measuring sense). The microprocessor is similar to, and often exactly the same as the CPU (central processing unit) of a microcomputer, which we call simply a micro. Although such a robot "brain" can be extremely sophisticated, taking in continuously-changing information from its "senses" and directing its "feet," usually wheels if it's a mobile robot, or more often its arms (most have only one). It's brain is still much less complicated than our own brains. It works only by digital switches, millions of On and Off switching, which is digital counting. For an explanation of digital counting, and how computers work, see the article in this issue on How Computers Work, and also the one which explains How Computers Count.
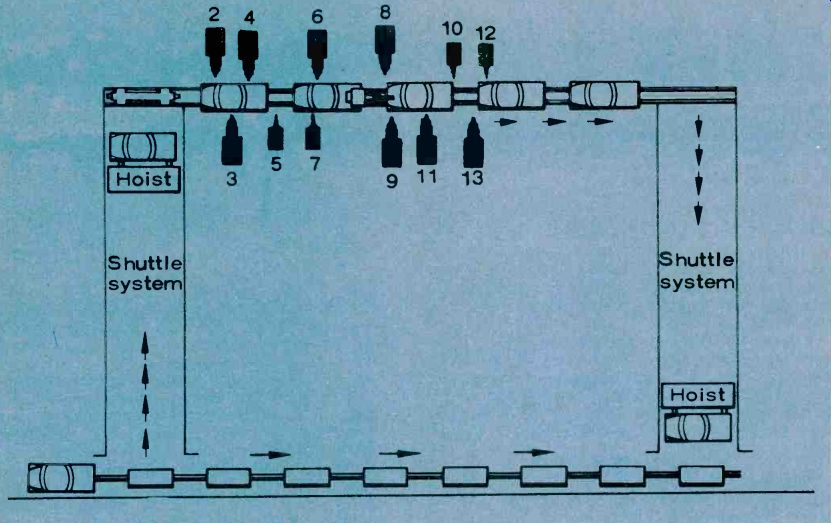
----- Drawing shows true (industrial) robots on production line
doing spot welding at Chrysler auto factory. Shuttle system raises
units to welding position. 12 spot welders move slowly with units during
actual welds. Shuttle system at right lowers welded units.
How The Brain Works
The diagram on this page shows, in simplified block form, how a microcomputer works. It's the same as the brain of a robot. It takes in information, either from its senses, or from a preprogrammed tape or other memory. It then does things depending on what the input information tell it to do. These things are most often picking something up, moving it, painting it, welding it, drilling it, and/or replacing it somewhere else.
Small industrial robots are already used widely to sort small objects, to pick them up and place them into larger assemblies, and for dozens of other dull, simple, repeated tasks. Robots can be used for any job which is repeated enough to make it pay by replacing a human's work. Some robots are already doing jobs which are dangerous for humans, and they will continue to do more and more of them.
Intelligent Robots
If a robot is to do a job which depends on varying conditions, it can receive information as shown on the second diagram. This is called self-intelligence, and is a robot of greater complexity.
Although robots can be made to move around, it will be along time before moving robots will do very complicated tasks. Most moving robots are just for demonstration, or for learning about robots and computers. One such robot is the one sold by the Heath Company (both as a kit, and factory-assembled) and described in another article in this issue.
-------- Robodroid (above) includes micro keyboard for programming
moveable "head" which speaks and converses through speaker.
Industrial Robots
Most of the robots in existence now, and increasing in the future, are industrial robots. They are an outgrowth of automation (automatic machines) which started in the Fifties, and became established widely in many factories in the Sixties. The programmable robot--as distinguished from a control system built into the machine itself, began to appear in the late Sixties.
Today there are more industrial robots in Japan than anywhere else. It's believed they have well above 15 thousand industrial robots at work now, with many more being added each month. The US is second, with perhaps half or more that number, steadily growing of course. Germany and Sweden are believed to have between five and eight thousand robots each, on production lines, with other countries also adding them.
The Soviet Union of course has many robots in similar applications, but it's much harder to estimate their numbers, which are believed between those of Japan and the US. These numbers are purely for industrial, useful robots, and do not include toys or learning machines.
Four Kinds of Robots
Robots already in use which can be programmed to perform particular operations fall into four groups: (1) Fixed-sequence robots (2) Variable-sequence robots (3) Numerical control robots (4) Playback robots The last category are robots which can be taught a sequence of complicated operations by a worker who "walks" the robot through its paces. Once the operator is satisfied the robot can do the job perfectly, it's on its own; the sequence is stored in its memory and thereafter it can keep doing the task(s) as long as desired.
That's usually until the robot is needed to do another job, or the job is changed to become even more complex. These are called "second-generation" robots.
More recent (third-generation) robots can be programmed to respond to changes in the situation. These are usually something which it can sense by sight or by feel; visual or tactile sensing (or both). In other words, these more sophisticated robots can detect changes in the world around them and make decisions based on that information. These decisions affect the actions of the robot.
Fixed Sequence Robots
These machines perform successive steps in a given order. Preset conditions and information are built into the robot and they are not readily changed. Such machines are barely capable of being called robots because they are designed for a specific, relatively simple operation or series of steps.
Variable Sequence Robots
These robots are similar to the above type, except that the information placed into them can be changed readily to accommodate new and different jobs.
Numerical Control Robots
The first numerical control machines (and still the most numerous) were programmable machine tools in machine shops. In these a skilled machinist teaches the programmable machine (a drill press is a simple example, or a milling machine is a more complex one) how to handle a series of operations on a piece of raw metal.
After he's gone through the operation correctly the machine can do it. If it makes any slight mistakes he reprograms the memory of the machine (usually a tape) and the machine can then do it properly.
These numerical control machines are used widely, and the information they use can be on punched cards (IBM cards) as well as magnetic tapes.
Playback Robots
This is an extension of the numerical control system. The word playback suggests the tape playing back the sequence of operations recorded on it by the human operator, the "teacher." How They Work Industrial robots are generally fixed in place, though obviously they may be moved for new tasks. Most often they consist of an arm mounted on a base, with the electronics (brain) in the base. The arm is capable of motion in two or more axes, up to a maximum of eight.
See the diagrams showing left-right arm mobility, and rotation of the "wrist." These are two of the possible axes of motion, which are among those the human arm can make (much more easily). The possible motions for a robot arm (and a human one) are as follows:
(1) Arm sweep, or left-to-right movement
(2) Shoulder up-and-down movement
(3) Elbow extending (arm goes backward/forward)
(4) Body turning (left/right)
(5) Wrist up/down (pitch)
(6) Wrist left-right (yaw)
(7) Opening of hand (gripper)
(8) Change direction of hand (gripper)
Many robot arms use only five or six of these motions, even so achieving a great deal of movement and complicated tasks.
The third diagram shows a modern six-axis robot which can do very involved tasks on an assembly line.
Most robots, if they simply paint, or weld, or cut or drill, are much simpler of course.
What's Ahead
The programmable robot which can respond fully to changes in its environment is the ultimate robot of course. Robots who can understand spoken commands and answer "intelligently" as in the movie 2001, are on the way. But even when they appear to understand, it will only be to a limited number of commands.
GE Looking Ahead
Until now, matching robots to specific industrial tasks has been done by trial and error, requiring the creation of expensive prototype robots. Recent research and advances at the General Motors Research Laboratories have produced a computer system that can be used not only to select the right robot for the job, but also to program it to perform the job in the most efficient way.
Dozens of Kinds
There are several dozen different kinds of robots, each with different capabilities. Until now, choosing the right robot for a particular task has been mostly a manual process, involving a great deal of time and money.
By combining three previously separate disciplines into a single research computer system, two General Motors scientists have made the introduction of robots, on a much larger scale than ever before, to the automobile factory a more rational, less costly job.
Roboteach
Roboteach is the name of the computer system which combines the three separates disciplines: (1) Robotics, (2) Solid Modeling, and (3) Simulation. Designed and developed by GM researchers Mary Pickett and Robert Tilove, it implements a powerful new programming language for manipulating robots. The language specifies robot motions (Robotics). However, this language cannot specify the robot's environment, its physical situation. Thus it cannot automatically account for physical obstacles, or prevent collisions.
Using only robot programming languages, actual physical testing of the robot is required to make it work in a real, physical environment.
Solid modeling, on the other hand, provides a complete representation of the physical environment (in mathematical terms). But solid modeling represents only one environment. It cannot deal with changing conditions.
While robot programming is without physical context, solid modeling is nothing but physical context. Neither by itself is adequate.
In addition to these two disciplines, the robot and its physical context must be simulated, in a series of discrete steps, converting the program into a series of continuous motion. Thus simulation is the third discipline combined with the first two into a computer program for teaching the robot its tasks.
Roboteach combines the three disciplines in a computer representation of the environment, the robot, and the task. This permits GM (and other using Roboteach) to reach decisions about the real world (robotizing a job) without the previously high expenditure of time and money, or setting the robots up ahead of time in a real, factory setting.
More Robots Coming
Not only are robots proliferating rapidly, but the tasks they will do are becoming more complex, making the need for off-line (ahead-of-time planning and programming) more urgent. When there are only half a dozen types of robots in a factory programming them by today's show-and-teach methods for each new job is possible. But when there are hundreds of robots, as is beginning to be the case at GM and other large factories, the value of being able to reprogram them without actually taking each type onto the factory floor is of enormous value, both in time and money.
Looking Ahead
Special-purpose robots will dominate production within a few decades, and ultimately be able to repair themselves. Until that time, however, people who know about computers will be needed to design, build, and repair the robots which do the work. That time is now, and any wise person entering the work force will do well to learn all he can about microcomputers, the brains of the machines of today, and even more, of the future.