
by ROY DELGADO, KERRY GEIST, and JIM HUNTER
[Roy Delgado and Kerry Geist have been design engineers at Klipsch & Associates in Hope, Ark. since 1986. Jim Hunter, who has been with the company since 1978, is Design Engineering Manager. ]
Most loudspeaker performance characteristics can be measured scientifically. Agreement is almost universal about which characteristics are of major importance and, thus, which to measure. Such measurements quantify our progress toward development of the ideal loud weaker. The problem is that the ideal loudspeaker, in its purest sense, is unattainable (at any cost) due to the limits of contemporary technology. For the purposes of this article, therefore, characteristics of a practical ideal loud weaker have been established. The relative importance of these characteristics is a subjective judgment that we will not attempt to address in this article. Yet, in our view, the practical ideal loudspeaker should exhibit the following characteristics:
--High efficiency and dynamic range. Though different characteristics, they usually parallel one another.
--Low distortion. In our experience, distortion is generally inversely proportional to efficiency.
--Controlled coverage. Basically, this is the ability to maintain a desired coverage angle over the full spectrum of music, and to minimize room aberrations to the response.
--Flat frequency response. Need we elaborate?
--Phase coherency. This affords smooth response, homogeneous sound from the drivers, and proper recreation of soundstage.
--Reliability. A loudspeaker should work continuously and with repeatable performance.

above: Cutaways of exponential horn (left) and tractrix horn.
This practical ideal assumes that you can achieve all the good qualities of a drive system while avoiding its compromises. In practices, the compromises involved in real systems are often significant. For example, a given drive system might exhibit extremely flat axial response but have very low sensitivity.
Two basic drive systems are in use today, the direct radiator and the horn loaded compression driver. (We classify direct radiators as any drive system Which directly couples to air, i.e., acoustic suspension, vented box, electrostatic, etc.) A knowledgeable listener will have certain expectations from a good example of each system type relative to the practical ideal. Good systems of either type should be capable of flat frequency response. Beyond this, a good direct radiator system should be able to provide moderate efficiency and dynamic range, low harmonic distortion, wide (though not necessarily controlled) polar response, and good phase coherency. A good horn loaded system should be able to deliver high efficiency, wide dynamic range, low harmonic and modulation distortion, controlled (though not necessarily wide or narrow) coverage, and reliability.
As you can see, both system types lack and share some performance characteristics of the practical ideal system. As makers of both types of drive systems, this is no surprise to us at Klipsch. Because our company has long espoused the superiority of horns ever direct radiators in most applications, any shortcoming of horn-loaded systems relative to the practical ideal is of particular interest to us. We therefore quickly noted that the list of horn speakers' virtues does not include phase coherency. Why is this? Phasing is basically a product of interaction between two or more sources which are delivering the same frequency. The sources can be drivers or drivers and reflections. Thus, multiple drive systems and coverage patterns of the drivers in a system influence the phase coherency of that system. Room acoustics and boundaries also influence phase coherency because of sound reflections.
Phase coherency is more difficult to achieve between a midrange and a high-frequency driver than between a midrange and a woofer. This is because sounds at normal midrange/ treble crossover frequencies have relatively short wavelengths. At the same time, phase coherency at this crossover is important due to the enormous amount of musical information at these frequencies. With horn designs, there are yet other problems to overcome.
Relative to tweeter horns, midrange horns are typically longer from throat to mouth, that is, from driver diaphragm to room. Therefore, the frequencies in the narrow band that both drivers reproduce simultaneously, due to practical crossover roll-offs, may arrive at the listening position milliseconds apart.
This can cause phasing irregularities.
The area expansion of a midrange horn is also critical in control of phase coherency. If the flare rate of the horn is too fast, more interference between the midrange and tweeter may be experienced due to broad vertical coverage. If the flare rate is too slow, the sound waves may reflect from the horn mouth and cause phasing irregularities within the horn itself, thus producing ragged frequency response.
Over the years, Klipsch has improved the phase coherency of horn loaded drivers and systems, and the recent advance of using the tractrix horn is particularly significant. About two years ago, we were seeking ways to reduce the depth of some of our midrange drive elements. We hoped that the new drivers, when developed, would give us greater coverage control and interact favorably with other system drivers to give us better phase coherency.
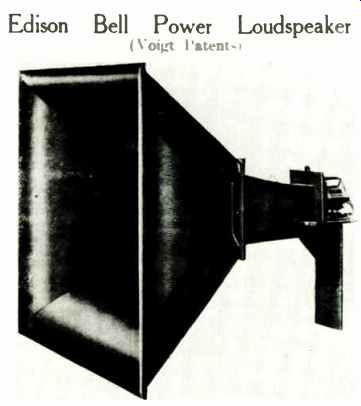
above: A tractrix horn built from a Voigt design by Edison Bell in
Britain. Edison Bell Power Loudspeaker.
Depth easily could have been reduced by switching from a horn to a direct radiator. However, such a driver's sensitivity would not match that of the other drivers in the system, nor would a direct radiator allow for control of angular coverage. So this design was rejected.
We thought an answer to our problem might lie in some type of new or existing combinational equation for a horn, and began working in that direction. One day, we stumbled upon an article by Dr. Bruce Edgar in the May 1981 issue of Speaker Builder magazine. Edgar advocated the tractrix equation for woofer horns of shorter length.
The tractrix equation, per se, isn't new. It was first described to Edgar by P.G.A.H. Voigt in a letter written in January 1981. In the letter, Voigt wrote that in the late 1920s he had been developing an equation for a woofer horn contour that allowed a sound wave to expand naturally. Voigt described how he presented a sketch of "his" contour to a draftsman. He wanted nothing from him but a better rendering. The draftsman quickly recognized the sketch as a type of mechanical curve known as tractrix. (It is also known as Schiele's anti-friction curve.)
Voigt was likely the first to apply the tractrix equation to a horn. Yet, to our knowledge, the equation had never been used in a horn of the small dimensions we desired and had never been used in a typical midrange application.
Various horn designs are routinely named for the curve of the horn wall between the .throat and mouth. The exponential, conical, and hyperbolic horns may be the best known. The tractrix curve (Fig. 1) essentially combines properties of the other three curves without borrowing too many of their compromises.
Near the throat, the tractrix horn is most like an exponential horn. A pure exponential horn is extremely efficient at transferring acoustic energy from a high-impedance source (such as a driver diaphragm) to a low-impedance source (such as air). In the middle section, the tractrix horn is most like a conical horn. A pure conical horn offers excellent control of directivity and uniform polar response. At the mouth, the tractrix horn is most like a hyperbolic horn which has a large mouth and an exit angle approximating 90° from axis. The large mouth expands bandwidth capabilities, while the exit angle minimizes sound reflections within the horn.
Thus, the tractrix curve is, in itself, a hybrid of other curves, and the tractrix curve ultimately used by Klipsch has been further "hybridized." The pure tractrix equation necessitates a horn which is circular from throat to mouth.
We built a pure tractrix horn designed to operate smoothly from 600 Hz up ward. In tests, we noted a very smooth coverage angle of approximately 45° from 1.2 to 8 kHz. At 8 kHz, the cover age pattern began to narrow, becoming 30° at 20 kHz. Because the horn was circular, this coverage pattern was the same horizontally and vertically.
Our design goal was horizontal cover age of 60° and vertical coverage of 40°. So we were mildly encouraged by this data and hoped that we could get the tractrix coverage closer to our de sign goal by converting the horn from a circular configuration to a rectangular one.
Making this conversion required more than math. In a trial-and-error process over many arduous months, various geometric configurations were attempted. Finally, our horn gave us the horizontal and vertical coverage angles we wanted, and those cover age angles were smooth up to 20 kHz.
Almost within grasp was more than we had ever hoped-a high-frequency horn for a two-way system! Yet, without equalization, we couldn't keep the sound pressure level uniform (or up) as we climbed in frequency. We therefore opted to further test the horn for its originally intended application, a mid range driver, and selected 7 kHz as a crossover frequency. Then came the time to test this horn in a system.
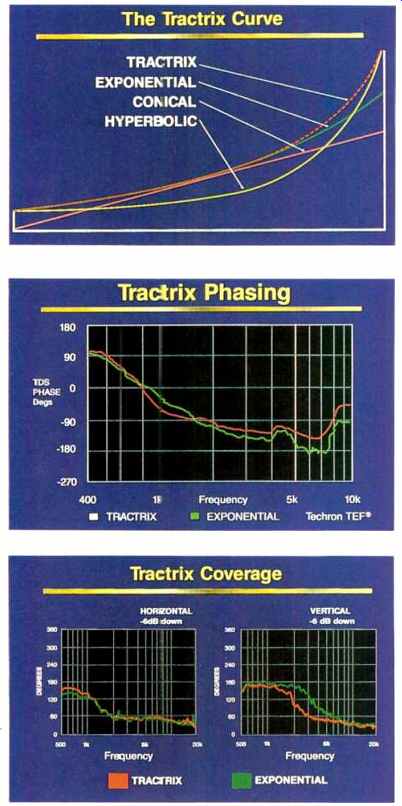
(top) Fig. 1--Flare rates of four horn types. At various points, the tractrix
curve mimics the flare rates of other curves traditionally used in horn designs.
(middle) Fig. 2--Acoustic phase of the Klipsch-designed tractrix horn and the Klipsch K-701 exponential horn. The tractrix horn's more consistent phase angle shown here is only part of the reason it outperforms the exponential horn; see text.
(above) Fig. 3--Horizontal and vertical coverage of the Klipsch tractrix and K-701 exponential horns. Horizontal coverage is similar, though the tractrix horn's coverage is smoother.
We built a pair of Klipsch Forté speaker systems, using tractrix instead of exponential horns. We then performed an A/B listening test between these modified Fortés and a pair of Fortés which use exponential horns, he Klipsch Model K-701. (See inset photograph, at the beginning of this article, for a comparison of the two horn flares.) From the first, we preferred the system pair with the tractrix horns. On and off axis, the tractrix system sounded much smoother. We heard a more homogeneous sound: All drivers seemed to work as one, and he image had better definition and stability. We assumed these improvements were a result of better phase coherency within the system; however, this turned out to be just partially true.
On a Techron TEF analyzer, we ran acoustic phase tests of the tractrix horn relative to the exponential horn. (See Fig. 2.) The tractrix horn revealed just slightly better (more consistent) phase angle. We honestly had expected to see a greater improvement. Surely such a small improvement in phase angle could not create such big changes in our perception.
We took a second look at the coverage angle. (See Fig. 3.) Again we compared the tractrix to the exponential and noted that, within the operating passband, the tractrix had a much narrower vertical coverage angle. Obviously, some of the improvement we heard could be attributed to reduced interference between the tractrix and the other system drivers. Also, the narrower vertical coverage angle of the tractrix horn was reducing room reflections, and this, apparently, was also improving phase coherency. Simply stated, the tractrix horn was living in harmony with its neighboring drivers and the room.
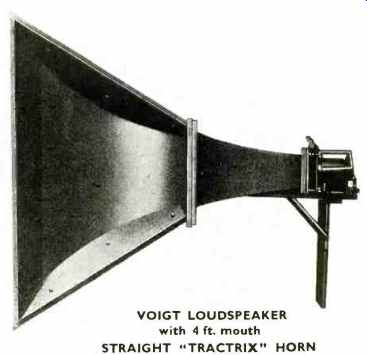
A Voigt loudspeaker with tractrix horn. VOIGT LOUDSPEAKER with 4 ft.
mouth STRAIGHT "TRACTRIX" HORN
Though we still may not have the ideal loudspeaker, the tractrix design has significantly advanced us toward that elusive goal. The tractrix can greatly improve the phase coherency of horn systems and, in fact, phase coherency is now something one can expect from a horn-loaded system.
Our original intention with tractrix was to release it in a "new" system or systems. Because much of our experimentation was conducted with our existing Forté speaker, we first released it as an improvement to this system and named it the Forté II. Tractrix horns have since been employed in the new Quartet (a smaller version of the Forté II) and in the Chorus II (an improvement to the previously existing Chorus). We remain confident of the sonic improvements of tractrix design and are incorporating this technology where appropriate in our line.
GLOSSARY
Efficiency: The measure of how much incoming electrical energy a loudspeaker converts to outgoing acoustical energy. Generally expressed as a percentage.
Sensitivity: The measure of the sound pressure level (SPL) generating by a loudspeaker at a given level of electrical power input.
Dynamic range: The difference, in decibels, between ambient noise level and maximum output level.
Distortion: The addition of acoustic information that was not present in We original signal.
Coverage: Expressed in degrees, We pattern or physical area where a loudspeaker radiates the bulk of its acoustic power. A coverage angle is traditionally defined by the points off axis where sound-pressure level rolls to 6 dB below the sound pressure level delivered on axis at a given frequency. Assume, for example, that a system delivers a 3 kHz signal at 100 dB SPL at a given distance on axis, that this SPL remains near constant at the same distance from the system until 30° off axis in either direction horizontally, and that the SPL then falls below 94 dB. Such a system is considered c have a horizontal coverage angle of 60°.
Phase coherency: The ability of a loudspeaker system or driver to maintain a consistent acoustic phase angle; the ability of two or more sound sources to act as one, without peaks and dips in the response, throughout the summed coverage angle of all sources. Note hat excessive room reflections add to the number of apparent sources.
Reliability: The ability of a loudspeaker to operate continuously and with repeatable performance in its designed application.
Tractrix: When used in a horn, a curve with a flare rate which maintains an approximate 90° angle at each intersection with an expanding sound wave.
(adapted from Audio magazine, Mar. 1991; Bert Whyte)
Also see:
The Why and How of Horn Loudspeakers (Mar. 1971)
= = = =